Am 05.12.2019 klingelte der Wecker für Celina Paepke und Martin Eitel besonders früh. Es sollte der Tauchroboter, der in den vergangenen Wochen unter Martins Händen im Schiller-Makerspace entstanden ist, erstmals zu Wasser gelassen werden. Dazu hat uns die Stadt Offenburg freundlicherweise das Springerbecken im nagelneuen Freizeitbad zwischen 07:00 und 10:00 zur Verfügung gestellt.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren

Der Tauchroboter ist mit 6 Motoren, einer schwenkbaren Videokamera, 4 leistungstarken LEDs und einem Greifarm ausgestattet.
Damit kann er bis zu einer Tiefe 100 Meter Livebilder an den Kontrollcomputer schicken, bzw. Proben an die Oberfläche bringen.
Pünktlich um 07:00 ist das Team eingetroffen, um mit den vorbereitenden Tests zu beginnen, zudem unter anderem ein Drucktest gehört, um die Dichtigkeit von Akku und Elektronikgehäuse zu gewährleisten.
Nach Abarbeiten der „PreDive“-Checkliste sollte der Roboter nun mit dem Kontrollcomputer verbunden werden, ein Vorgang, den wir im Vorfeld mehrfach erfolgreich durchgeführt haben. Allein jetzt wollte es nicht klappen. Da wir nur mit Handwerkzeug und ohne Messgeräte vor Ort waren, mussten wir vorerst alles wieder einpacken und, etwas enttäuscht, zurück zum Makerspace.
Auf der Rückfahrt gab es die ersten Ideen, zur Überprüfung der Verbindung und kaum am Schiller angekommen wurde das Problem gefunden:
Der Tauchroboter kommuniziert über ein Pseudonetzwerk mit dem Kontrollcomputer. Dieses benötigt wiederum eine echte IPv4-Netzwerkkonfiguration, die bei unserem Rechner nur aktiv ist, sobald ein USB-Ethernet-Dongle eingesteckt ist. Den hatten wir im Schwimmbad nicht dabei.
Ein Blick auf die Uhr: 08:45. Das reicht, also alles wieder ins Auto und zurück zum Schwimmbad, Tauchroboter ausgepackt, eingeschaltet, mit dem Computer verbunden und gewassert.
Jetzt waren noch einige Konfigurationsarbeiten nötig, um die Drehrichtung der Motoren richtig einzustellen, aber dann gings los: Er fährt!
Auch der Greifarm wurde getestet, ein ins Becken geworfener Schnorchel wurde mit Erfolg mehrmals geborgen.
Nun freut sich das Team auf weitere Tests im Schwimmbad kommende Woche, bevor es dann in das eigentliche Revier, die Gewässer um Offenburg herum, geht, um verschiedene Methoden, Gewässer- und Bodenproben zu nehmen, zu entwickeln.

Er fährt, bzw. taucht! (ndt. auch: „taugen“)
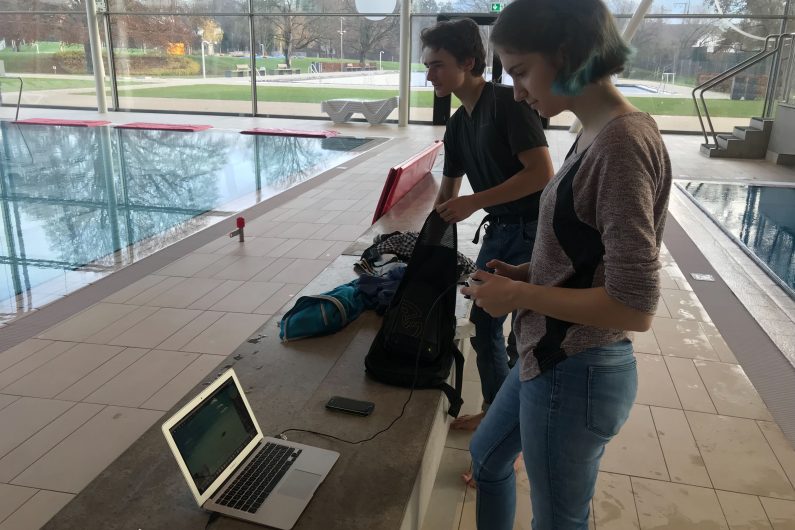
Der First-Person-View ist auf dem Laptopbildschirm zu erkennen. Steuern lässt sich der Roboter mit einem Xbox-Controller.